| 高宽厚(站立) | 1210x357x190mm |
|---|---|
| 整机重量 | 约 25kg |
| 单腿自由度 | 6 |
| 关节输出轴承 | 交叉滚子 + 双沟球 |
| 单手臂自由度 | 5 |
| 关节运动空间 | 腰关节:Y±150° R±30° ,膝关节:-10°~+148° ,髋关节:Y:±157° P:-168° ~+146° R:-60° ~+100° |
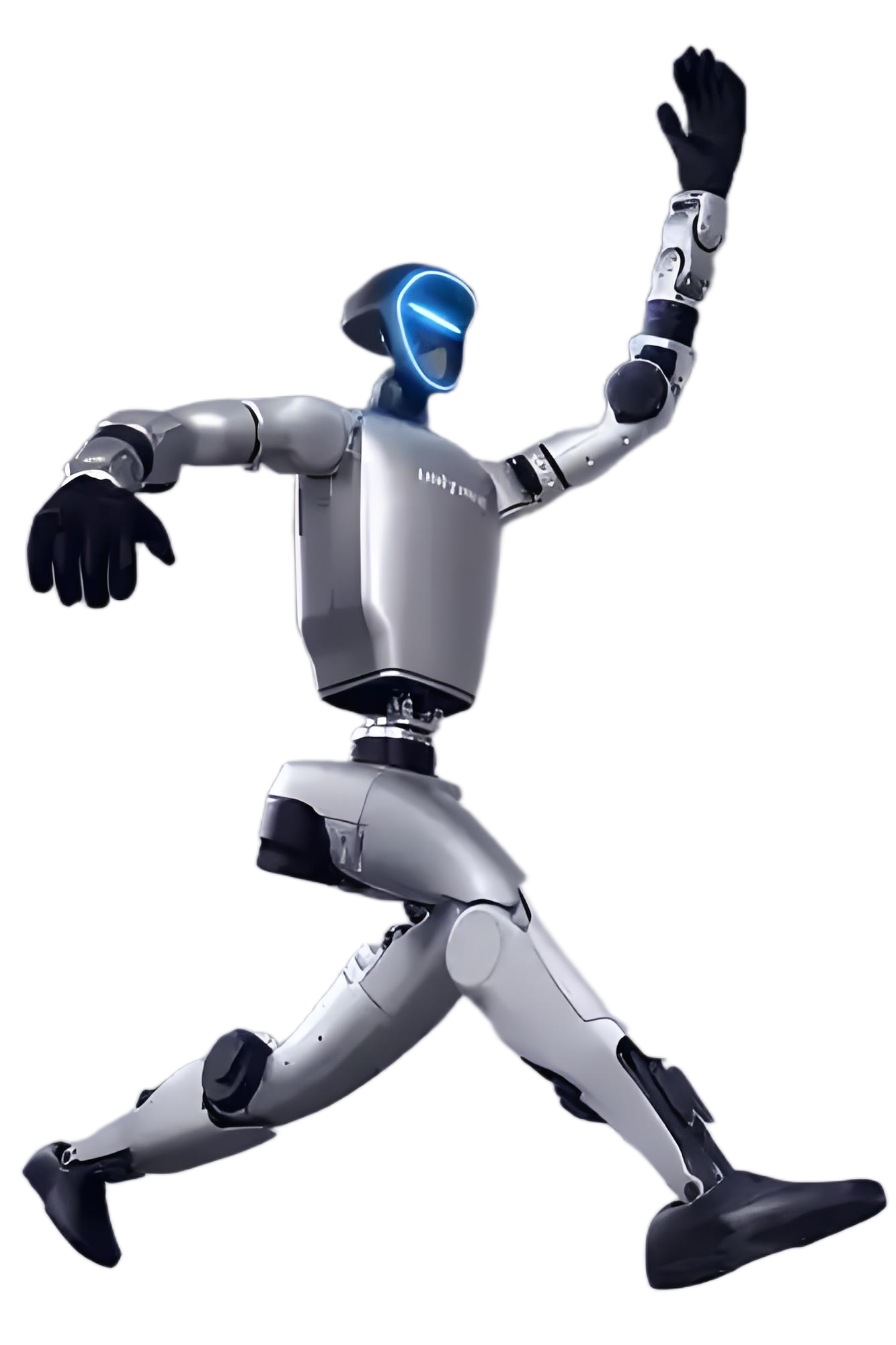
| 关键尺寸 | (1520+285)mm × 570mm × 220mm |
|---|---|
| 整机重量 | 约 47kg |
| 单腿自由度 | 5(髋关节 × 3 + 膝关节 × 1 + 踝关节 × 1) |
| 关节输出轴承 | 工业级交叉滚子轴承(高精度,高承载力) |
| 运动能力 | 3.3m/s(世界纪录),潜在运动性能>5m/s |
| 电池 | 15Ah(0.864KWh),最大电压67.2V |
| 高宽厚(站立) | 1320x450x200mm |
|---|---|
| 高宽厚(折叠) | 690x450x300mm |
| 带电池重量 | 约35kg |
| 关节输出轴承 | 工业级交叉滚子轴承(高精度,高承载力) |
| 超大关节运动空间 | 腰关节:Z±155° 膝关节:0~165° 髋关节:P±154°、R-30~+170°、Y±158° |
| 续航时间 | 约2h |
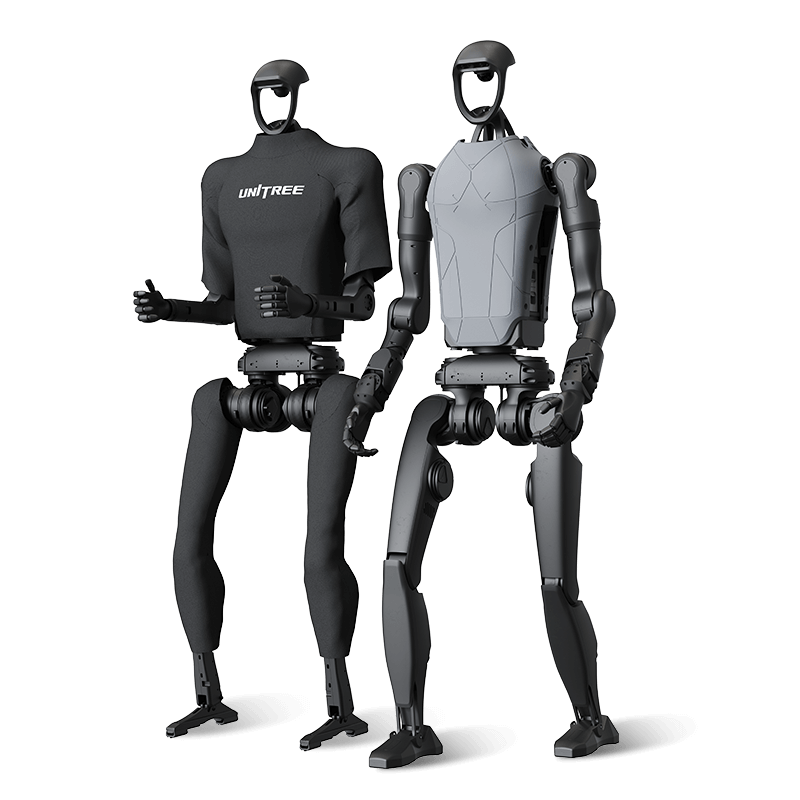
工业人形机器人
| 全尺寸 | 身高176cm,体重70kg,自由度52个,2m/s高速拟人行走 |
|---|---|
| 转身角度 | +-162° |
| 俯仰角度 | +90°到-35° |
| 手部自由度 | 11个 |
| 单手抓握 | 7.5kg |
| 阵列式触觉压力传感器 | 6个 |
全尺寸通用轮式人形机器人
| 全尺寸 | 身高176cm,自由度44个,2m/s高速平稳移动 |
|---|---|
| 转身角度 | +-170° |
| 俯仰角度 | +90°到-35° |
| 腰部升降范围 | 0-0.4m |
| 作业范围 | 0-1.8m |
| 负载 | 15kg |
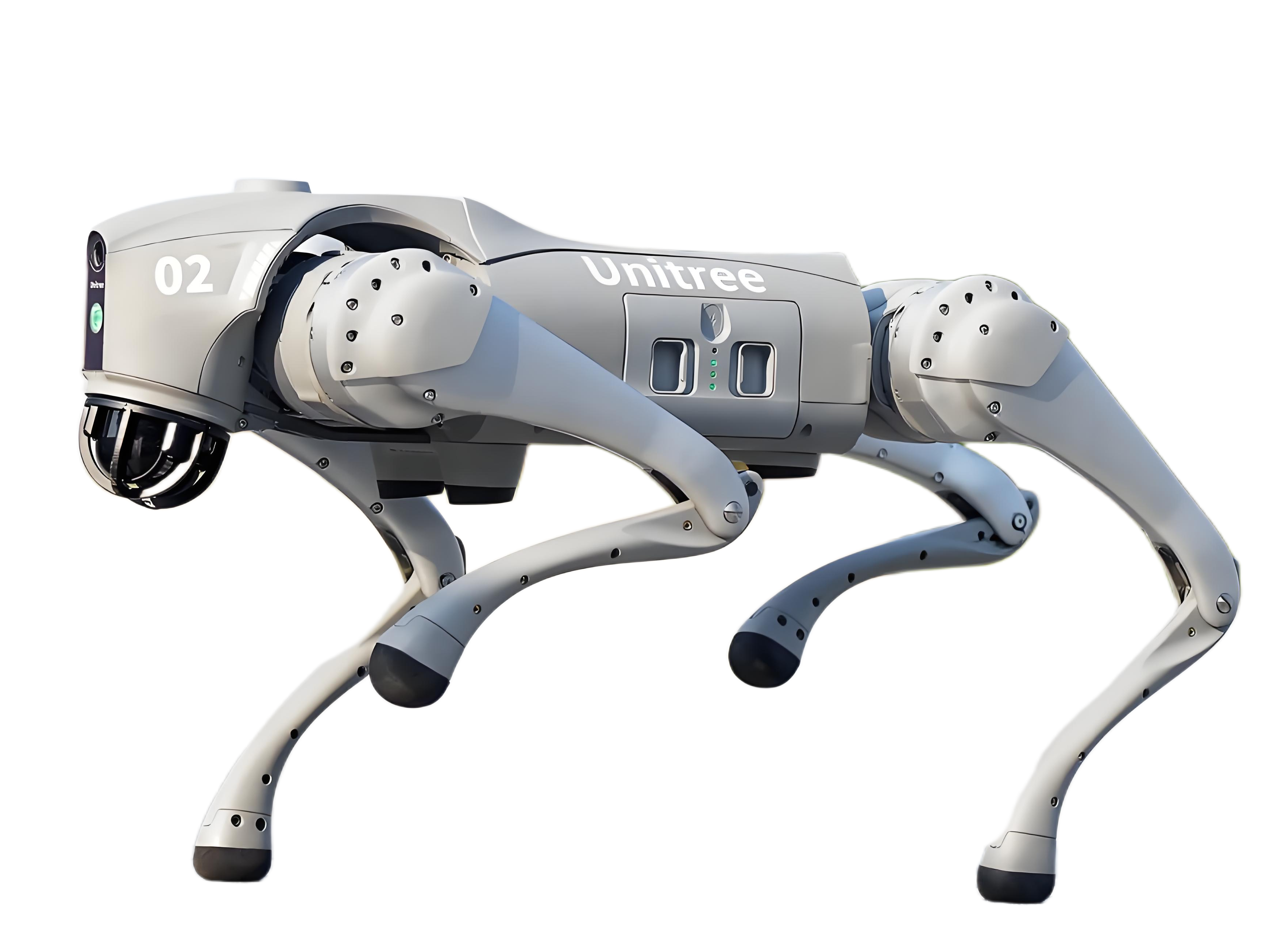
| 站立尺寸 | 70x31x40cm |
|---|---|
| 关机趴下尺寸 | 76x31x20cm |
| 带电池重量 | 约15kg |
| 最大攀爬落差高度 | 约16cm |
| 最大攀爬斜坡角度 | 40° |
| 续航时间超大关节运动空间 | 机身:-48~48° 大腿:-200°~90° 小腿:-156°~-48° |
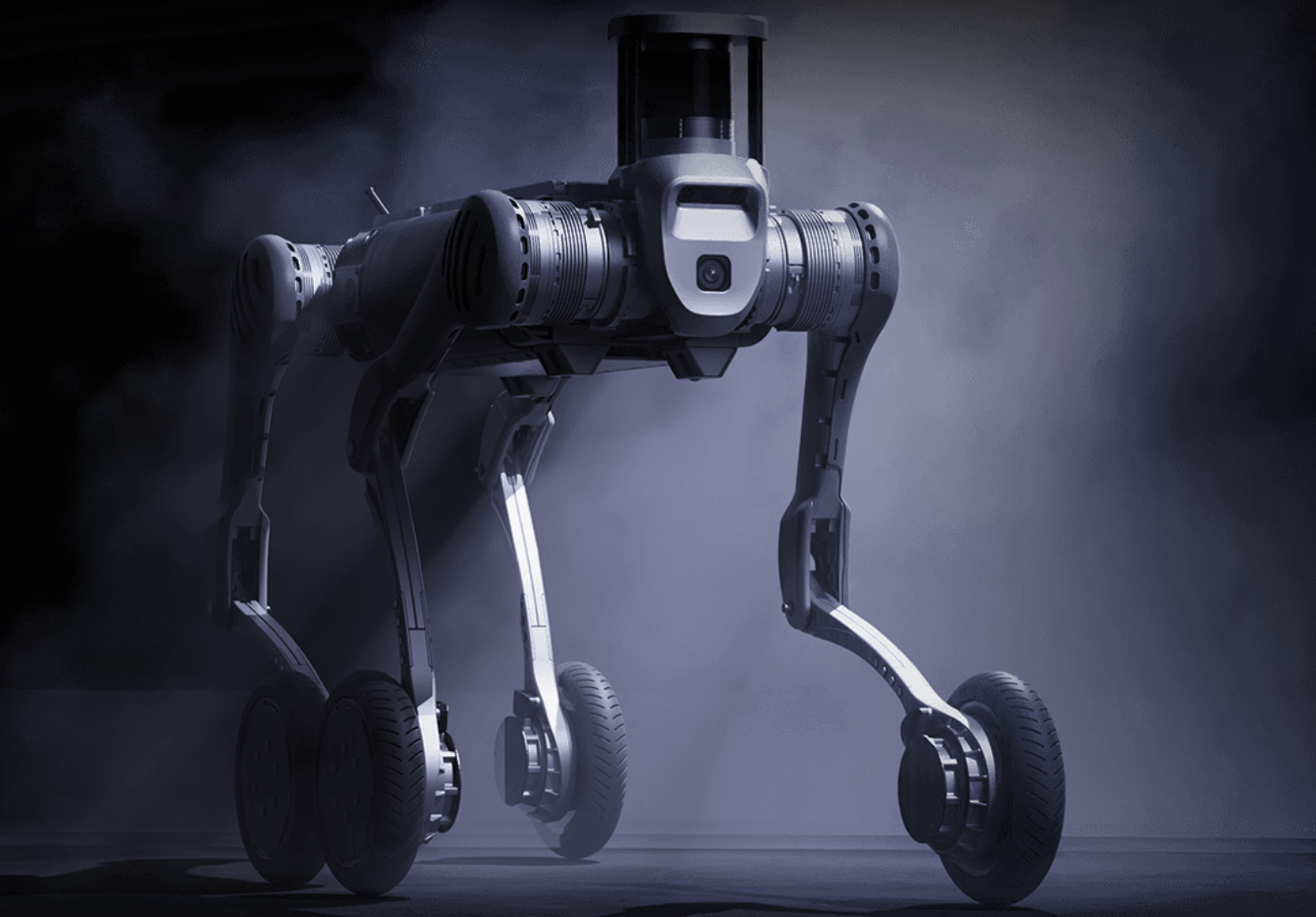
| 站立尺寸 | 70cm x 43cm x 50cm |
|---|---|
| 关机趴下尺寸 | 76x31x20cm |
| 带电池重量 | 约 18kg |
| 最大攀爬落差高度 | <70cm |
| 最大攀爬斜坡角度 | 40° |
| 续航时间超大关节运动空间 | 机身:-48~48° 大腿:-200°~90° 小腿:-156°~-48° |
| 站立尺寸 | 约 1098mm×450mm×645mm |
|---|---|
| 折叠尺寸 | 约 880mm×460mm×330mm |
| 带电池重量 | 约 60kg |
| 续航 | 综合运行续航4-6小时;空载持续行走> 5h,且续航里程> 20km; 20kg 负载持续行走> 4h,且续航里程> 15km |
| 站立负载 | 最大 120kg |
| 持续行走负载 | > 40kg |
| 站立尺寸 | 约 1098mm×550mm×758mm |
|---|---|
| 折叠尺寸 | 约 950mm×550mm×450mm |
| 带电池重量 | 约 85kg(整机,含电池约12kg) |
| 续航 | 40kg负载最大续航里程25km,空载最大续航里程约30km |
| 站立负载 | 120kg |
| 持续行走负载 | > 40kg |
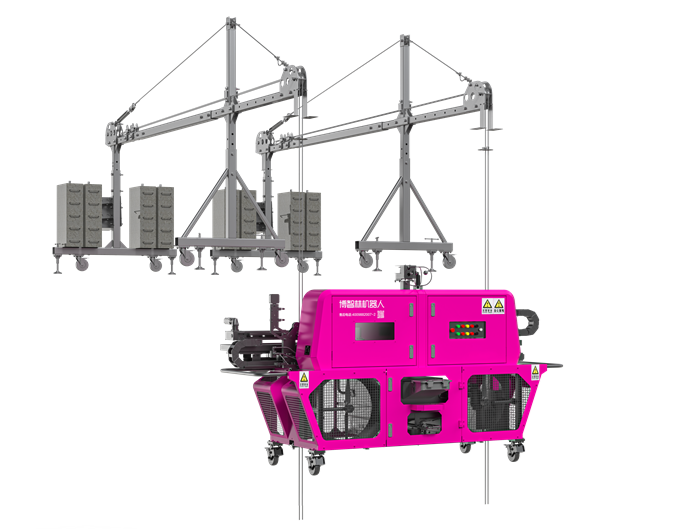
混凝土浇筑智能化解决方案,实现高效精准布料作业
| 适用场景 | 不同楼面、地库的混凝土布料作业 |
|---|---|
| 机型配置 | 12米/15米/18米/20米四种机型 |
| 人力节省 | 仅需30%人力完成布料工作 |
| 工作效率 | 减少13%摊平工作量 |
| 工作模式 | 自动/随动/点动/人工4种模式 |
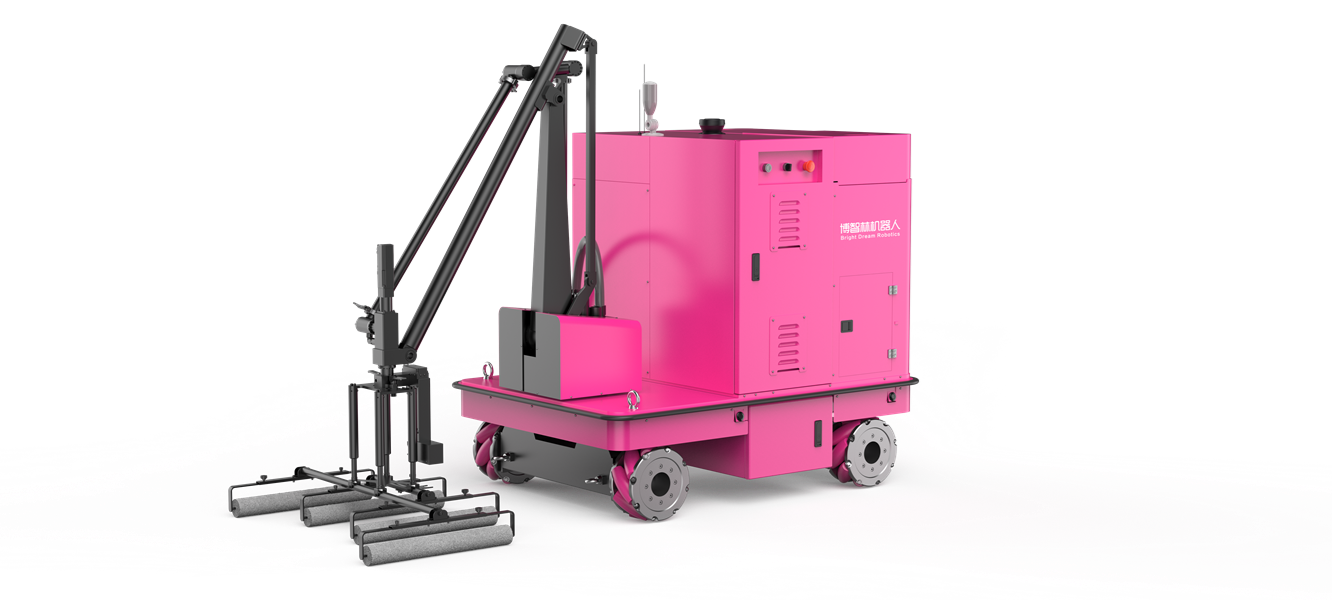
一次成型 毫米精度
| 适用场景 | 住宅楼层、地库、厂房、机场、商场等混凝土整平作业 |
|---|---|
| 工作阶段 | 混凝土初凝阶段(提浆、收面、控制标高) |
| 整平头配置 | 1米/1.5米两种规格 |
| 核心技术 | GNSS导航、双自由度自适应、激光测量、智能控制算法 |
高精度自动化测量解决方案,提升工程测绘效率
| 测角精度 | 1" |
|---|---|
| 测距精度 | ±(1mm+1ppm) |
| 测量范围 | 无棱镜200m,有棱镜3000m |
| 数据采集 | 支持自动数据记录和传输 |
| 防护等级 | IP54 |
建筑内墙和天花板腻子自动化打磨解决方案
| 适用场景 | 住宅、洋房、商品房、公寓、办公楼等精装修或工业装修 |
|---|---|
| 打磨部位 | 建筑内墙、天花板腻子层 |
| 核心功能 | 恒力打磨、自动导航、路径规划、吸尘集尘、自动排灰 |
| 控制系统 | APP远程操作、参数化工艺设置 |
| 质量保证 | 打磨质量稳定可靠 |
全自动墙面喷涂解决方案,实现高效均匀的涂装效果
| 适用场景 | 住宅、办公楼、商业空间等室内墙面喷涂 |
|---|---|
| 工作效率 | 180㎡/h |
| 定位精度 | 20mm± |
| 覆盖率 | ≥90% |
| 最大作业高度 | 3200mm |
| 控制系统 | BIM集成+AI算法优化 |
建筑立面智能化喷涂系统,解决高空作业安全与效率难题
| 规格尺寸 | 3250×1700×2000mm |
|---|---|
| 机器人重量 | 650kg(不含涂料)/950kg(满载涂料) |
| 喷涂类型 | 高压无气喷涂(TR500)/低压有气喷涂(TD500) |
| 喷涂介质 | 乳胶漆(TR500)/浮雕漆、多彩漆、真石漆(TD500) |
| 施工净功效 | TR500:500㎡/h;TD500:浮雕漆/多彩漆500㎡/h,真石漆300㎡/h |
| 施工综合功效 | TR500:180㎡/h;TD500:浮雕漆/多彩漆180㎡/h,真石漆100㎡/h |
| 喷涂最大列宽 | 5000mm |
| 涂料容量 | 200L |
| 供电方式 | 3相 AC380V |
| 抗风等级 | ≤8.3m/s(五级风) |
自动化地坪研磨解决方案,提高施工质量和效率
| 工作宽度 | 850±50mm |
|---|---|
| 磨盘 | 4x285mm |
| 研磨电机转速 | 0~1700rpm |
| 最大移动速度 | 0.5m/s |
| 行走续航时间 | >2h |
| 爬坡角度 | ≤10° |
| 工作电压 | AC380V |
| 额定功率 | 850S: 20kW / 850MAX: 21.5kW |
| 电池容量 | 48V&30Ah |
| 自动导航精度 | ±50mm |
| 整机尺寸 | 850S: 1670x915x1450mm / 850MAX: 1980x915x1450mm |
| 整机重量 | 850S: 780kg / 850MAX: 820kg |
工业级地坪自动化施工系统,实现高精度漆膜控制
| 整机重量 | ≤500kg(空载) |
|---|---|
| 整机尺寸 | 1400×1050×1800mm |
| 续航时间 | ≥6h |
| 充电时间 | 4h(普充) |
| 电池容量 | 48V&100Ah |
| 作业宽度 | 2.8m(刮涂)/3.8m(辊涂) |
| 覆盖率 | 85% |
| 越障高度 | ≤30mm |
| 越沟宽度 | ≤50mm |
| 移动速度 | ≤1m/s |
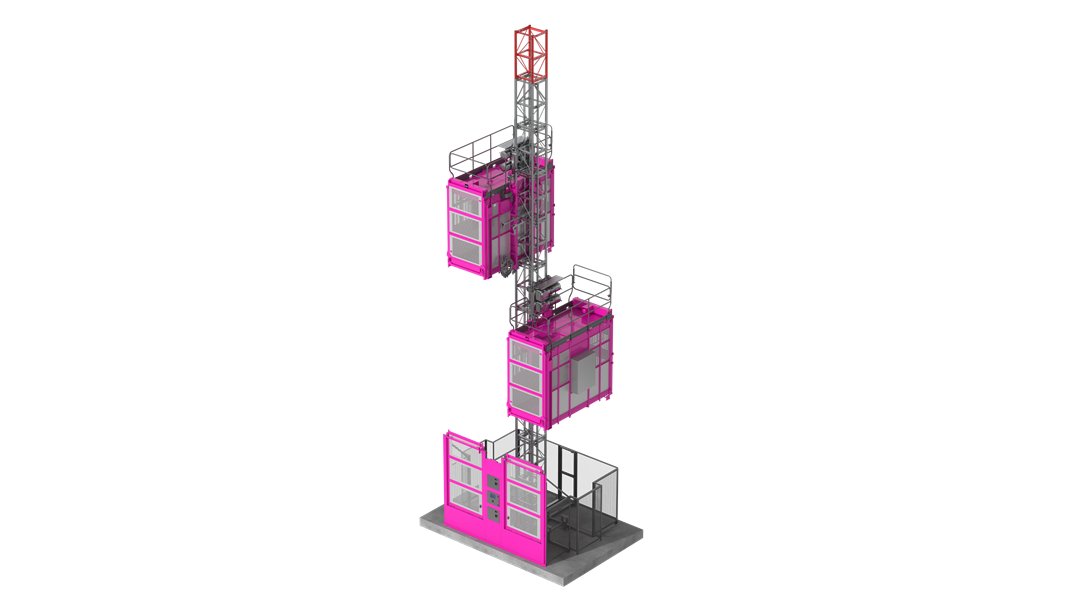
高层建筑施工专用垂直运输设备,实现安全高效的人员物料运输
| 产品型号 | ZSC200/200A |
|---|---|
| 最大架设高度 | 242m |
| 额定载重量 | 2×2000kg |
| 额定载人数 | 2×23人 |
| 额定安装载重量 | 2×1000kg |
| 安全器标定动作速度 | 60m/min |
| 起升速度 | 0-36m/min |
| 设备功率 | 2×2×15kW |
| 吊笼尺寸 | 3.2×1.5×2.45m |
| 标准节尺寸 | 650×650×1508mm |
| 控制方式 | 变频调速+PLC控制 |
| 安全防护等级 | IP54 |
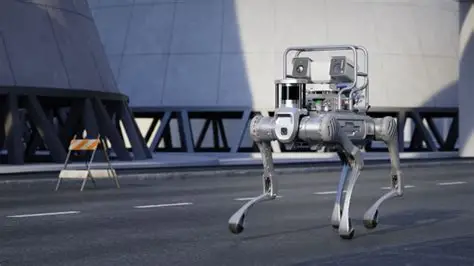
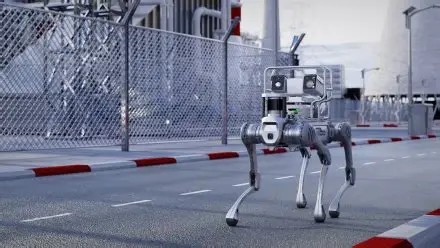
实现智能导航与物体识别抓取
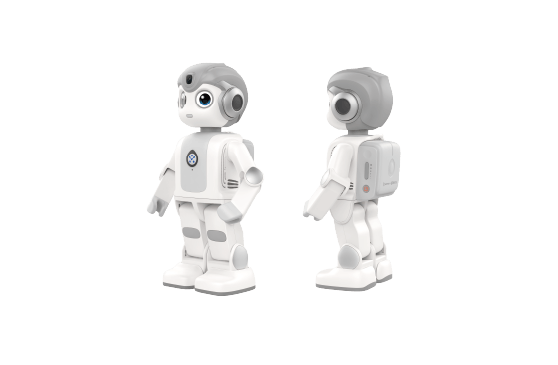
儿童青少年心理情感成长机器人
高性能边缘计算设备,为机器人提供本地算力支持
| 算力能力 | 192G显存、4096张量核、2.58PFLOPS算力 |
|---|---|
| 模型 | DeepSeek-R1-Distill-Qwen-32B |
| 知识库 | Dify |
| 其他 | 集成PyTorch深度学习框架、SGLang推理引擎、WEB人机交互 |
| 并发数 | 160 |
专为中国市场优化的AI计算加速器
| 显存容量 | 96GB HBM3 |
|---|---|
| CUDA核心 | 5760个 |
| FP8算力 | 4.8 PFLOPS |
| 互连技术 | 第四代NVLink,900GB/s带宽 |
| AI加速 | Transformer引擎、FP8精度支持 |
| 能效比 | 比上一代提升2倍 |
全球领先的AI训练和推理加速器
| 显存容量 | 80GB HBM3 |
|---|---|
| CUDA核心 | 16896个 |
| FP8算力 | 8 PFLOPS |
| FP16算力 | 4 PFLOPS |
| 互连技术 | 第四代NVLink,900GB/s带宽 |
| PCIe支持 | PCIe 5.0 x16 |
| 能效比 | 比A100提升2.5倍 |
下一代AI超级计算加速器
| 显存容量 | 141GB HBM3e |
|---|---|
| 显存带宽 | 4.8TB/s |
| CUDA核心 | 18432个 |
| FP8算力 | 10 PFLOPS |
| FP16算力 | 5 PFLOPS |
| 互连技术 | 第五代NVLink,1.2TB/s带宽 |
| PCIe支持 | PCIe 6.0 x16 |
| 能效比 | 比H100提升30% |
工业级无人机运载机器人
| 尺寸 | 尺寸(展开,不包含桨叶):810×670×430 mm(长×宽×高),尺寸(折叠,包含桨叶):430×420×430 mm(长×宽×高) |
|---|---|
| 对称电机轴距 | 895 mm |
| 重量(含下置单云台支架) | 空机重量(不含电池):3.6 kg,空机重量(含双电池):6.3 kg |
| 最大起飞重量 | 9 kg |
| 最大旋转角速度 | 俯仰轴:300°/s,航向轴:100°/s |
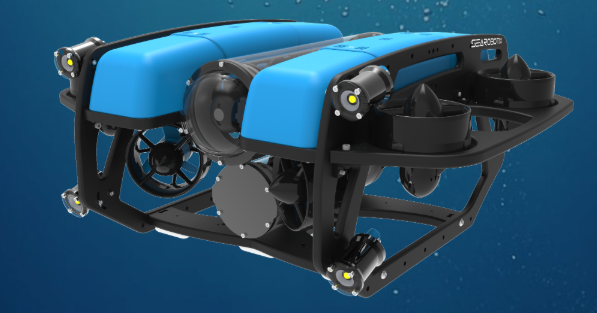
科研级开源水下机器人
| 尺寸 | 457 mm * 575 mm * 254 mm |
|---|---|
| 空气中重量 (正常配重) | 11 - 12 kg |
| 净浮力(正常配重) | 0.2 kg |
| 有效负载能力(取决配重) | 1.0 kg (四灯) ~ 1.2 kg (无灯) |
| 浮体材料 | BR3318 (额定深度 244 m ) |
仿人五指灵巧手
| 自由度 | 6+2 |
|---|---|
| 手指关节数 | 12 |
| 重量 | 540g |
| 重复定位精度 | ±0.20mm |
| 抓握力分辨率 | 0.50N |
| 拇指横向旋转范围 | >65° |
| 拇指侧摆速度 | 235°/s |
| 拇指弯曲速度 | 150°/s |
H7立式自助机
适用于娱乐、教育和竞技场景